Hey, I'm Steven. Seeing something I've created in motion gives me goosebumps, so I strive to find areas in my life where I can make that happen. I've built sensor stations, RC trucks, and automated systems for manufacturing. I take electronics apart and put them together. I write code for automated systems like self-driving cars. I pursue opportunities to influence the next generation of robotics and automation. I have a Bachelor's of Engineering in Computer Engineering and have completed Udacity's Self-Driving Car Engineer Nanodegree program.
I write Python scripts, shell scripts, and full desktop applications. I write clean, maintainable, version-controlled code.
I write firmware for PIC, ARM microcontrollers using Nordic's API for Bluetooth LE enabled devices, and Arduino-compatible devices. I work in C, C++, and assembly.
From CAD to manufacture and soldering, I design circuitry and PCBs that control consumer wearables and automated manufacturing systems.
I work with RC cars, self-driving cars, and automated moving sensor systems.
I work with Keras and scikit-learn to create and train classifiers and convolutional neural networks in Python and C++. I use R and Python for statistical analysis.
I implement kernels, perform image pre-processing for machine learning, and use OpenCV.
Product design and firmware for a wearable ultraviolet light dosimiter.

My work at Shade as lead electrical engineer involved developing the prototype for our second generation ultraviolet light dosimiter. This involved circuit design, component research, and working with mechanical engineers to design a case. I'm responsible for writing the firmware and creating the programming fixture for the device.
Technologies used: Eagle CAD, C, Nordic SDK
This project is closed-source
Automated pan-tilt sensor station for collecting ultraviolet light data.

As part of Shade's research team, I built a pan-tilt arm with an Arduino-based controller and a Python script to automate rotation and data logging from the attached sensors.
Technologies used: Python, C++, Nordic SDK, Arduino
This project is closed-source
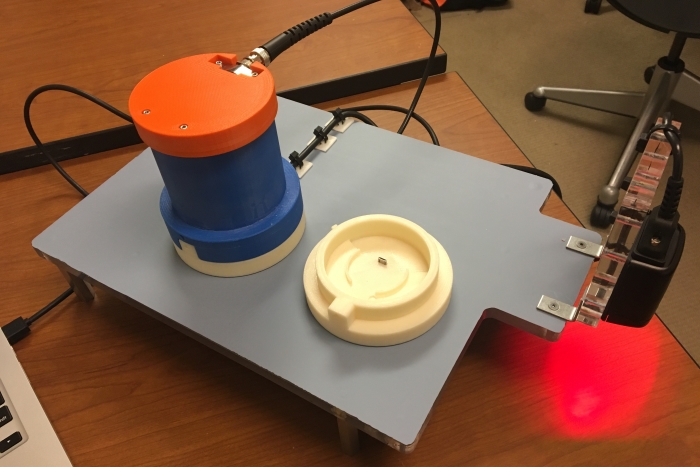
Automated system for performing functional tests for a wearable device.
My first project while on Shade's manufacturing team. This involved understanding all electrical components and digital outputs from the Shade device.
Technologies used: Python, C, C++, Nordic SDK, Arduino
This project is closed-source
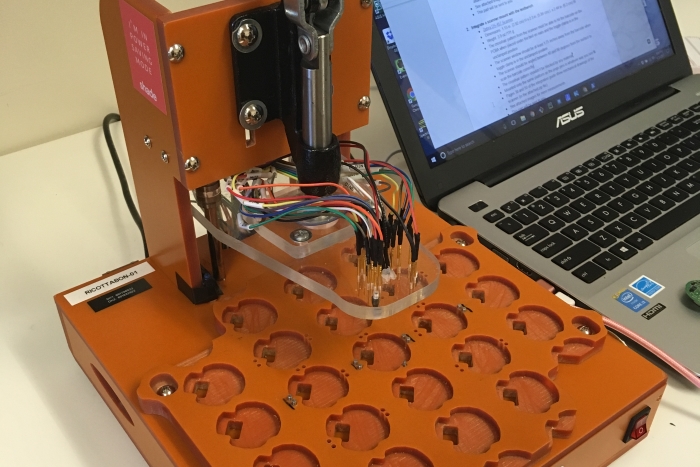
Automated system for calibrating and testing Bluetooth functionality of a wearable device.
This system connects to fully fabricated Shade sensors via Bluetooth and calibrates the device. I wrote the scripts that ran the calibration station and validated calibration was performed correctly.
Technologies used: Python, C, C++
This project is closed-source
ROS based controller and traffic light classifier for a self-driving car.

The capstone project for the Udacity Self-Driving Car Nanodegree program. I worked on a team of four to implement a traffic light classifier and controller for Udacity's self-driving car "Carla". This code was tested on Carla at Udacity HQ in Palo Alto.
Technologies used: Tensorflow, C++, Robot Operating System (ROS), Python
GitHub repo
Using a fully convolutional network for road identification using Tensorflow.

Final-term project for the Udacity Self-Driving Car Nanodegree program. This is a classifier that is able to identify and color road pixels in an image using convolutional and deconvolutional neural network elements.
Technologies used: Tensorflow, Python
GitHub repo
A small "Galaga-like" game written in Assembly for a PIC18F4520 microcontroller.
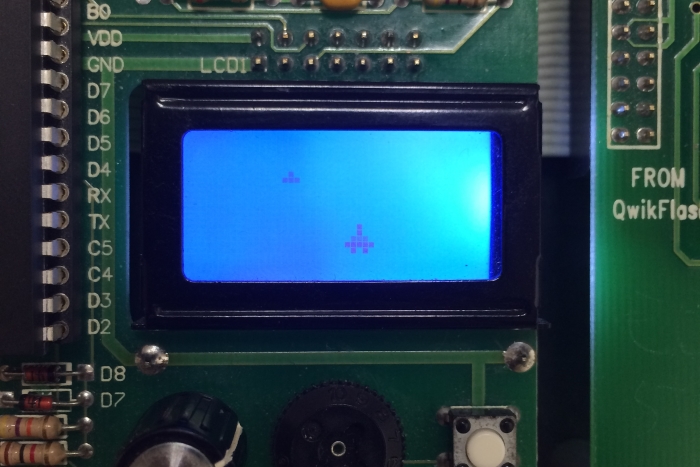
This was my final project for Computer Engineering lab in my final semester at City College of New York.
Technologies used: PIC Assembly, QwikFlash prototyping board
Video
Report
GitHub repo
OpenGL rendering of generated nail art with a Qt interface.
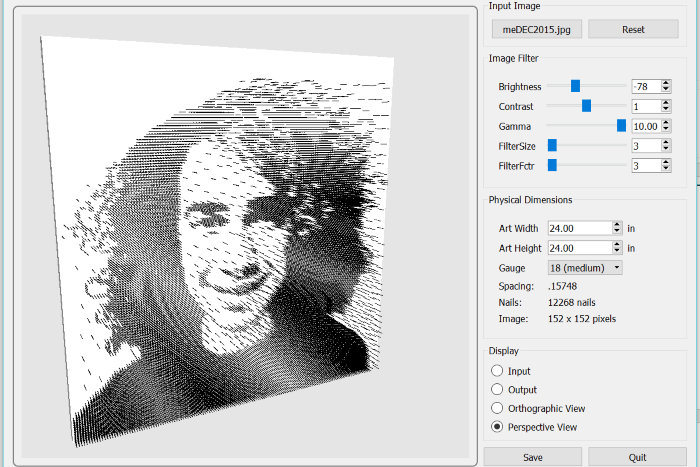
Capstone computer science project at City College of New York. Desktop Application using Qt and OpenGL to render a 3D preview of art made from iron nails based on an input image.
Technologies used: OpenGL classic, Qt4, C++
Report
GitHub repo
Arduino-based RC truck made of junk for use in a short film.

A commission for a short film. The car uses two Arduinos, a radio receiver in the truck, and a radio transmitter in an old playstation controller. The truck is made mostly of used bottles.
Technologies used: Arduino, C++
GitHub repo
